Laser Warning System
The Laser Warning System is a passive defence warning system aiming to detect, track and warn different kinds of laser threats in the typical wavelength range between 0.5 – 1.65 µm, allowing the monitoring of the space around the platform and the detection of the incoming threats in advance, by reducing the threat detection time.
Its purpose is to reduce the vulnerability to the numerous laser associated weapon threats on the modern EW battlefield, by providing the platform with an early warning when irradiated by a pulsed, modulated or continuous laser light.
The LWS is employed to protect sea, land or air combat platforms.
Ensuring a 360° coverage in azimuth and 90° in elevation, by the positioning of two or more sensor heads on the platform.
It is a reliable, flexible, self-contained laser threat detection system, suitable for integration into any protection system.
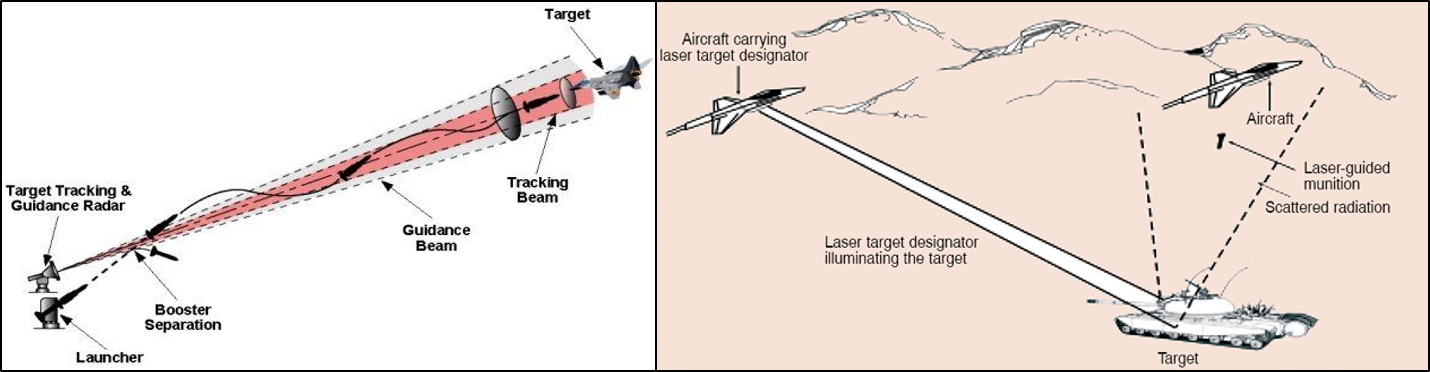
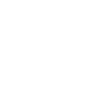
Figure 1: Schematization of the possible LBR threat scenario (left side), and LTD threat scenario (right side)
These warning systems should be able to distinguish different kinds of threats.
The most common laser threats that this kind of system is able to detect are: Laser Range Finder (LRF) used for distance measurement, Laser Target Designator (LTD) used for target designation, Laser Beam Rider (LBR) used for missile guidance, and other lasers used for illumination purposes, such as illuminators, pointers, dazzlers and night vision devices.
|
Characteristics |
LRF |
LTD |
LBR |
|
Typical Laser Peak (W) |
106 |
106 |
few |
|
Laser Beam Divergence (mrad) |
<1 |
<1 |
<1 |
|
Power density at the target |
High (on-axis) Low (off-axis) |
High (on-axis) Low (off-axis) |
Very low (on-axis) Undetectable (off-axis) |
|
Wavelength (µm) |
1.06 & 1.54 |
1.06 |
Near Infrared |
|
Speed of the incoming threat (Mach) |
2 |
1 – 2 |
>4 |
Table 1: Typical laser threat sources characteristics
A laser warning system typically consists of three subsystems: optical, detection and processing.
The incident laser beam radiation is focused and directed by the optics and transmitted toward the detector.
The optical signal is transduced into a digital signal from the detection subsystem.
Finally, the processor subsystem produces the warning output, which contains the characteristics of the laser radiation.
This information is used to trigger an appropriate countermeasure against laser-hostile threats.
The optical subsystem can be composed by mirrors, lenses and optical elements, properly arranged to focus the optical signal on the detector.
It could be additionally equipped with filters, in order to reduce the effects of background noise, with the aim to reduce the false alarm rate.
The detection subsystem may include different kind of photo sensors (CCD – CMOS – fast-photo detector), to cover the entire spectral band, and a spectrometer (Fabry-Perot etalon, Michaelson/Fizeu/grating interferometer), depending on the method to reconstruct the characteristics of the incident laser beam.
The processor subsystem is the core of the entire system; it consists of digital signal processors able to compare the measured incident beam with data pre-stored in the processor, in order to recognize the type of laser threat.
A typical LWS usually performs the following activities:
- Detect Laser Threats Characteristics
It defines the capability to detect all types of lasers pulsed or continuous wave and discriminate them from the background and any other light sources, by identifying their main characteristics, such as: Pulse Repetition Frequency – laser power – wavelength band. - Threat Type Identification
It consists in the comparison between the inferred parameters, measured by the hostile laser threat, with the internal database, which is properly pre-stored according to the operative scenario. - Threat Direction of Arrival
It is the ability to define the direction of the incoming threat, in terms of azimuth and elevation coordinates.
This is the essential to trigger the counter measure process. - Reflected Beam Rejection
The main issue in the laser detection is to discriminate the radiation coming from the direct laser beam, to the radiation due to the atmosphere scattering (aerosol) or reflected by platform itself (target splash).
LWS must be able to get rid of unwanted laser radiations, by means of filters, in order to reduce the false alarm rate. - Multiple Threats Handling
LWR must have the capability to deal with multiple threats since there are a variety of laser sources in the battlefield scenario.
The LWS is able to manage multiple threats, occurring with delay time, identifying direction of arrival and type of each threat.
However, the capability to reject scattered or reflected beams restricts the multiple threats handling. - Detection Efficiency
It is defined by the possibility to record a laser signal at maximum distance with the probability of correct detection not less than 0.9.
Efficiency decreases with the maximum detection distance of the laser signal source.
This decrease is caused by the influence of different factors including weather conditions, background situation and atmospheric turbulence.
Figure 2: Different laser energy contributions illuminating the LWS




